
什么是电动车控制器
发布日期:2022-06-10 浏览次数:588
电动车控制器专用dc-dc降压电源芯片:
SL3036 ESOP8 工作电压8V-100V 最大电流2A (内置MOS管)
SL3036H ESOP8 工作电压8V-150V 最大电流1.5A (内置MOS管)
SL3038 SOP8 工作电压8V-150V 最大电流5A(外扩MOS管)
SL3041 ESOP8 工作电压10-100V 最大电流3A(内置MOS管)
SL3041H ESOP8 工作电压10-120V 最大电流1.5A(内置MOS管)
SL3042 SOP8 工作电压10-120V 最大电流10A(外扩MOS管)
宽电压降压恒压芯片,大功率降压ic,48V降压芯片,60V降压芯片,72V降压IC,85V降压IC,90V降压芯片,100V降压IC,120V降压芯片
电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就像是电动车的大脑,是电动车上重要的部件。电动车就来看主要包括电动自行车、电动二轮摩托车、电动三轮车、电动三轮摩托车、电动四轮车、电瓶车等,电动车控制器也因为不同的车型而有不同的性能和特点。
主要功能
恒流控制技术:电动车控制器堵转电流和动态运行电流完全一致,保证了电池的寿命,并且提高了电动车电机的启动转矩。
自动识别电机模式系统:自动识别电动车电机的换相角度、霍尔相位和电机输出相位,只要控制器的电源线、转把线和刹车线不接错,就能自动识别电机的输入及输出模式,可以省去无刷电动车电机接线的麻烦,大大降低了电动车控制器的使用要求。
随动abs系统:具有反充电/汽车EABS刹车功能,引入了汽车级的EABS防抱死技术,达到了EABS刹车静音、柔和的效果,不管在任何车速下保证刹车的舒适性和稳定性,不会出现原来的abs在低速情况下刹车刹不住的现象,完全不损伤电机,减少机械制动力和机械刹车的压力,降低刹车噪音,大大增加了整车制动的安全性;并且刹车、减速或下坡滑行时将EABS产生的能量反馈给电池,起到反充电的效果,从而对电池进行维护,延长电池寿命,增加续行里程,用户可根据自己的骑行习惯自行调整EABS刹车深度。
电机锁系统:在警戒状态下,报警时控制器将电机自动锁死,控制器几乎没有电力消耗,对电机没有特殊要求,在电池欠压或其他异常情况下对电动车正常推行无任何影响。
自检功能:分动态自检和静态自检,控制器只要在上电状态,就会自动检测与之相关的接口状态,如转把,刹把或其它外部开关等等,一旦出现故障,控制器自动实施保护,充分保证骑行的安全,当故障排除后控制器的保护状态会自动恢复。
反充电功能:刹车、减速或下坡滑行时将EABS产生的能量反馈给电池,起到反充电的效果,从而对电池进行维护,延长电池寿命,增加续行里程。
堵转保护功能:自动判断电机在过流时是处于完全堵转状态还是在运行状态或电机短路状态,如果过流时是处于运行状态,控制器将限流值设定在固定值,以保持整车的驱动能力;如电机处于纯堵转状态,则控制器2秒后将限流值控制在10A以下,起到保护电机和电池,节省电能;如电机处于短路状态,控制器则使输出电流控制在2A以下,以确保控制器及电池的安全。
动静态缺相保护:指在电机运行状态时,电动车电机任意一相发生断相故障时,控制器实行保护,避免造成电机烧毁,同时保护电动车电池、延长电池寿命。
功率管动态保护功能:控制器在动态运行时,实时监测功率管的工作情况,一旦出现功率管损坏的情况,控制器马上实施保护,以防止由于连锁反应损坏其他的功率管后,出现推车比较费力的现象。
防飞车功能:解决了无刷电动车控制器由于转把或线路故障引起的飞车现象,提高了系统的安全性。
1+1助力功能:用户可自行调整采用自向助力或反向助力,实现了在骑行中辅以动力,让骑行者感觉更轻松。
巡航功能:自动/手动巡航功能一体化,用户可根据需要自行选择,8秒进入巡航,稳定行驶速度,无须手柄控制。
模式切换功能:用户可切换电动模式或助力模式。
防盗报警功能:超静音设计,引入汽车级的遥控防盗理念,防盗的稳定性更高,在报警状态下可锁死电机,报警喇叭音效高达125dB以上,具有极强的威慑力。并具有自学习功能,遥控距离长达150米不会有误码产生。
倒车功能:控制器增加了倒车功能,当用户在正常骑行时,倒车功能失效;当用户停车时,按下倒车功能键,可进行辅助倒车,并且倒车速度最高不超过10km/h。
遥控功能:采用先进的遥控技术,长达256的加密算法,灵敏度多级可调,加密性能更好,并且绝无重码现象发生,极大地提高了系统的稳定性,并具有自学习功能,遥控距离长达150米不会有误码产生。
高速控制:采用最新的为马达控制设计专用的单片机,加入全新的BLDC控制算法,适用于低于6000rpm高速、中速或低速电机控制。
电机相位:60度120度电机自动兼容,不管是60度电机还是120度电机,都可以兼容,不需要修改任何设置。

改进方法
电动车控制器应该是兼顾蓄电池及电机的实际使用情况进行综合设计,应充分考虑蓄电池、控制器、电机三者之间的关系,将它们作为一个综合的系统来设计,从而得到更为理想的电动车控制器。而不应该是市售的只要具有无级调速,刹车断电、软启动……等功能的电动车调速器。针对电动自行车实际使用情况,我们对无刷电动自行车控制器的设计进行了改进,增设了如下的功能:
一、使电动车控制器具有输出端短路保护功能
本控制器可以实现输出端直接短路保护,即使在电机处于最高转速行动时(此时往往输出最高电压)直接短路控制器输出端,控制器也能很可靠的保护。在保护时电路自动降低了输出电流,以保护蓄电池的安全,此时电流约为0.3A,并随时检测输出端状态,当输出端故障排除后,控制器能自动恢复正常控制,具有自恢复功能,从而控制器具有自保护能力,提高了控制器和蓄电池的安全程度,也提高了对电机本身故障的耐受程度。针对电动自行车使用实际情况,出现堵转是可能出现的工况之一,如控制器能对输出端短路进行可靠保护,那么在电机堵转条件下,控制器同样可以进行保护,并可保护电机及蓄电池的安全。如果只具有限流功能的控制器,此时将输出大电流(如限流14A),这些使蓄电池(容量为12AH)处于大电流放电状态下(14A),将影响蓄电池的使用寿命。另外,大电流流经电机绕组,时间一长,将使电机温升上升,导致绕组绝缘老化,轻则影响电机寿命,重则烧毁电机。
二、采用双闭环控制系统
控制器采用双闭环控制系统(无刷:转速/电流双闭环,有刷:电压/电流双闭环),由于电流环存在,可以实现对电流的限幅,即可以保护电动车在处于各种正常运行情况下最大电流输出值不会超出设定的电流限幅值,实现自动限流,这样在任何运行情况下,蓄电池均不会出现超过设定值电流的放电过程,保证了蓄电池的安全。另外由于双闭环的配合作用,可以使电机实现最理想的启动过程和加速过程,使蓄电池的电流得到有效的利用,从而可以增加电动自行车的行驶里程。而市售控制器由于是单闭环控制系统,并依靠MC33035(MC33033)芯片的限流作用,所以在启动和加速时经常会出现控制器大电流输出至限流保护的运行状态。
三、欠压比较设计成电压滞环自锁比较
市面上有的控制器只具有欠压保护功能,即当蓄电池电压低于某一电压值后(如32V)封锁控制器不工作,这容易使用户利用蓄电池的回升电压工作(即蓄电池停止放电后,蓄电池电压会回升2~3v),从而造成蓄电池过放电。本控制器欠压比较设计成电压滞环自锁比较,这样可以有效地避免了蓄电池回升电压的使用。
按上述改进设计的有刷、无刷电动车控制器,经各种负载情况,各种路况实际行驶考验,证明其具有很高的可靠性。在堵转运行和输出端直接短路情况下均可实现可靠的保护,提高了无刷电动自行车控制器在实际运行时的可靠程度,改进后的控制器完全可以实现减少控制器的故障率,降低车辆返修率的目的。另外,由于电流环的作用,并可相对于一般市面上用的控制器可延长续驶距离近10%,行驶过程中有频繁加减速、反复上下坡时,电流环作用的效果更加明显。
技术开发
在传统的控制单元开发流程中,通常采用串行开发模式,即首先根据应用需要,提出系统需求并进行相应的功能定义,然后进行硬件设计,使用汇编语言或C语言进行面向硬件的代码编写,随后完成软硬件和外部接口集成,最后对系统进行测试标定。
整车控制器,尤其是纯电动车控制器,其整车控制器研发多采用V模式开发流程。软硬件技术的不断发展,为并行开发提供了强有力的工具。
第一步,功能定义和离线仿真。首先根据应用需要明确控制器应该具有的功能,为硬件设计提供基础;然后基础Matlab建立整个控制系统的仿真模型,并进行离线仿真,运用软件仿真的方法设计和验证控制策略。
第二步,快速控制器原型和硬件开发。从控制系统的Matlab仿真模型中取出控制器模型,并且结合dSPACE的物理接口模块来实现与被控对象的物理连接,然后运用dSPACE提供编译工具生成可执行程序,并下载到dSPACE中。dSPACE此时作为目标控制器的替代物,可以方便地实现控制参数在线调试和控制逻辑调节。
在进行离线仿真和快速控制其原型的同时,根据控制器的功能设计,同步完成硬件的功能分析并进行相应的硬件设计、制作,并且根据软件仿真的结果对硬件进行完善和修改。
第三步,目标代码生成。前述的快速控制原型基本生成了满意的控制策略,硬件设计也形成了最终物理载体ECU的底层驱动软件,两者集成后生成目标代码下载到ECU中。
第五步,调试和标定。把经过硬件再换仿真验证的ECU链接到完全真实的被控对象中,进行实际运行试验和调试。
分类
电动车控制器从结构上分两种,我们把它称为分离式和整体式。
1、分离式:所谓分离,是指控制器主体和显示部分分离。后者安装在车把上,控制器主体则隐藏在车体包厢或电动箱内,不露在外面。这种方式使控制器与电源、电机间连线距离缩短,车体外观显得简洁。
2、一体式:控制部分与显示部分合为一体,装在一个精致的专用塑料盒子里。盒子安装在车把的正中,盒子的面板上开有数量不等的小孔,孔径4-5mm,外敷透明防水膜。孔内相应位置设有发光二极管以指示车速、电源和电池剩余电量。
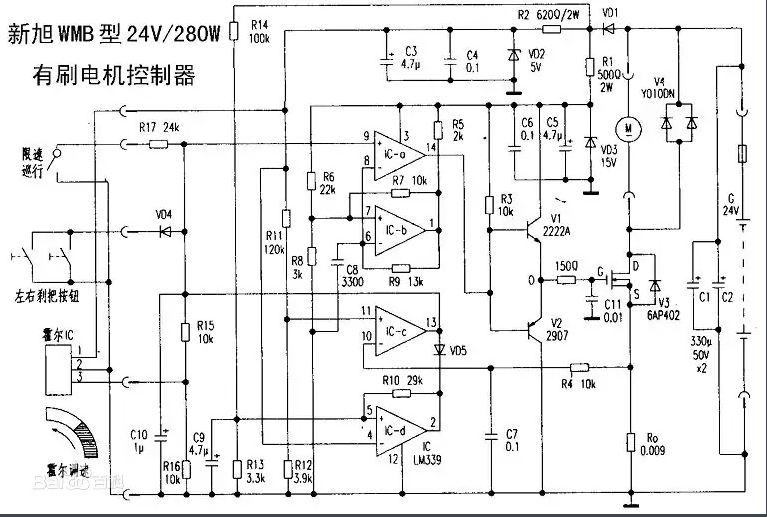
控制器电路图
简略地讲控制器是由周边器件和主芯片(或单片机)组成。周边器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电路功率管导通或截止、通过方波控制功率管的的导通时间以控制电机转速的驱动电路、输入输出端口等集成在一起,而构成的计算机片。这就是电动自行车的智能控制器。它是以“傻瓜”面目出现的高技术产品。
控制器的设计品质、特性、所采用的微处理器的功能、功率开关器件电路及周边器件布局等,直接关系到整车的性能和运行状态,也影响控制器本身性能和效率。不同品质的控制器,用在同一辆车上,配用同一组相同充放电状态的电池,有时也会在续驶能力上显示出较大差别。
***************END***************
文章内容整理自网络,如有侵权请联系沟通
